|
|
|
|
|
|
|
|
|
Biciclette, trottole, stagioni
Annibale
D’Ercole
|
La fisica degli oggetti rotanti è
alquanto complessa, e una sua trattazione, sia pure semplificata, è decisamente
al di là degli scopi di questa rubrica. Qui ne diamo solo brevi cenni, senza
pretesa di rigore e di completezza, allo scopo di introdurre il lettore nel
quadro logico in cui è inserita la dinamica dei corpi rotanti. Nel seguito, a
meno di esplicite eccezioni, ci riferiremo solo a corpi rigidi, ovvero corpi
che non si deformano sotto l’azione di forze esterne. Se spingiamo con una
forza F
un oggetto di massa m
sopra una superficie, imprimiamo a quest’ultimo una velocità υ
via via crescente in direzione della forza stessa. La
variazione di velocità (ovvero, l’accelerazione) termina quando smettiamo di
spingere, e, in assenza di attrito, l’oggetto continua a viaggiare a velocità
costante. Questa semplice immagine esemplifica la seconda legge di Newton che
può essere scritta in maniera succinta come
dove il punto sulle variabili indica
la loro variazione temporale e dunque, ad esempio,
È importante
sottolineare che la velocità (come peraltro la forza e la quantità di moto) è
un vettore, che può essere rappresentato da una freccia la cui direzione
coincide con la direzione del moto, e la cui lunghezza, detta modulo, è
proporzionale al valore della velocità (una freccia che rappresenta una
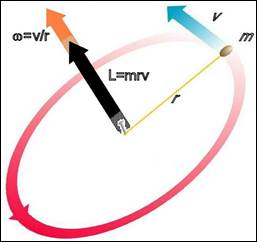
velocità di Consideriamo ancora un
oggetto in orbita circolare (Fig.
3) e diamo una serie di definizioni che potranno apparire cervellotiche e
noiose … preghiamo tuttavia il lettore di avere pazienza: tra poco ne capirà
le ragioni.
Fig. 3. Un oggetto in orbita circolare
con velocità υ
possiede una velocità angolare w
e un momento angolare L = mrυ.
Questi due vettori sono entrambi perpendicolari al piano dell’orbita e
diretti come indicato nella figura. Se la rotazione illustrata fosse stata in
senso orario, L
e w
avrebbero il verso opposto. Oltre alla velocità
lineare è possibile definire la velocità angolare ω che indica il numero di giri eseguiti
dal corpo nell’unità di tempo: è facile verificare che la relazione tra
queste due velocità è data da υ
= rω,
dove r
è il raggio dell’orbita circolare. È inoltre possibile definire il momento
della quantità di moto – o momento angolare – come L = rq = rmυ = mr2ω = Iω; l’ultimo passaggio tiene conto di
un’ulteriore definizione, quella del momento di inerzia I = mr2. Per definizione, L e
ω sono due vettori
entrambi paralleli all’asse attorno a cui ruota il corpo (Fig. 3). Finalmente, diamo l’ultima
definizione necessaria per il nostro discorso, quella del momento della
forza: se applichiamo all’oggetto raffigurato in Fig. 3 una forza F diretta come la velocità indicata
nella stessa figura, il momento della forza è dato da τ = rF ed è rappresentato da
un vettore diretto come L
e ω
(si confrontino
Fig. Naturalmente, al
crescere di τ
cresce anche
Da questa equazione si capisce che, in
assenza di un momento di una forza agente su un oggetto rotante (t = 0), la velocità angolare dell’oggetto
stesso non cambia (
C’è una certa analogia
tra l’equazione (2) e l’equazione (4); la prima ci dice che un corpo mantiene
costante la propria velocità (sia in modulo che in direzione) in assenza di
forze esterne, la seconda che un oggetto in rotazione mantiene costante il
proprio momento angolare (sia in modulo che in direzione) in assenza di un
momento della forza. Il momento angolare di una ruota di una bicicletta in
moto è allineato con il mozzo della ruota e dunque è parallelo al terreno.
Proprio la sua tendenza a mantenere inalterata questa direzione permette di
andare in bicicletta senza cadere. Vi è, comunque,
un’importante differenza tra l’equazione (2) e l’equazione (4): mentre la
massa m
rimane costante, il momento di inerzia I può variare. Nel caso di corpi
deformabili, un eventuale cambiamento della distanza r di alcune delle loro
parti dall’asse di rotazione implica una variazione di I: questa variazione deve
essere compensata da un cambiamento di ω in maniera che il momento angolare
rimanga costante, come imposto dall’equazione (4). Una pattinatrice sul
ghiaccio che inizi a ruotare su se stessa, tenendo le braccia tese
orizzontalmente, girerà sempre più velocemente avvicinando le braccia al
corpo (ovvero diminuendo il proprio momento d’inerzia), senza che
intervengano forze esterne, ma solo in virtù della conservazione del momento
angolare. Veniamo ora al fenomeno
della precessione. Abbiamo visto che una forza applicata a un corpo
parallelamente alla sua velocità varia il modulo di quest’ultima, ma non la
sua direzione; se invece la forza è ortogonale alla velocità, ne varia la
direzione, ma non il modulo. Analogamente, un momento della forza parallelo
al momento angolare di un corpo in rotazione ne varia il modulo, ma non la
direzione, mentre un momento della forza ortogonale al momento angolare ne
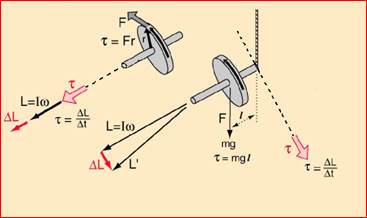
varia la direzione, ma non il modulo. Il primo caso lo abbiamo già discusso
ed è esemplificato nella parte sinistra della Fig.
4. Il secondo caso è pure illustrato nella stessa figura. Consideriamo un
disco in rotazione con il mozzo parallelo al terreno; uno dei due estremi è
vincolato a una corda che lo sorregge, mentre l’altro è libero di muoversi.
Il disco è sottoposto a un momento della forza dovuto alla gravità che agisce
sul baricentro del disco: t = lmg, dove l
è la semilunghezza del mozzo, m la massa del disco e g l’accelerazione di gravità.
Per quel che abbiamo detto in precedenza, t
è orientato ortogonalmente a l,
e dunque a L.
Pertanto, il momento della forza non cambia il modulo della velocità angolare
del disco, che continua a girare con la stessa rapidità; ne cambia però la
direzione, “tirando” il mozzo dalla propria parte e dando così origine alla
precessione, ovvero al moto di rotazione orizzontale del mozzo attorno
all’estremità vincolata alla corda. |